 手机版|
手机版|

 二维码|
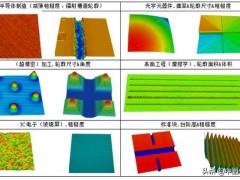
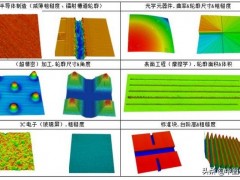
二维码|我们简介了一种可以进修的以外光学仪器色散厚度机器学习(D2NN)框架在功能强大岗位的直接色散层的基于厚度进修的其设计后来做到各种机能。我们通过建立3D读取的D2NN来试验说明了该组件的取得成功,这些D2NN研究会了做到书写小数点分类法以及扫描摄像机在太赫兹光度之中的机能。 随着既有不必要的3D读取和其他刻蚀研发新方法以及空间内红光调制器,这种以外光学仪器厚度进修组件可以以相对论性督导各种繁复的机能基于电子计算机的机器学习可以做到,并将在以外光学图像数据分析,形态检查和某类分类法之中找寻应用领域,还可以做到重新镜头其设计和光学仪器模块,可以进修采用D2NN督导鲜明的战斗任务。音频:>://tw.YouTube.的网站/html?k=64vebcBGiUU书名:>://arxiv.消/ftp/arxiv/papers/1804/1804.08711.pageD2NN框架。 D2NN的方法学如图1下图。虽然D2NN可以通过采用多层色散颗粒以反射或折射方式也做到,但这里力求一般化,我们集中精力于在顶层带有均增益采样的巨观反射因特网,其类似为较厚光学元件。 在这种情况,D2NN的每一层通过其神经细胞的增益最大值(即,反向)采样肯尼迪航天中心的波前。 遵循Rayleigh安Sommerfeld色散方程组,可以将formula_D2NN层的每个神经细胞视之为由不限光学仪器方式也分成的佩的二次光(23):(E)D2NN包含多个反射(或折射)层,其中formula_层上的每个点安插神经细胞,带有复值传送(或折射)常数。可以采用厚度进修来专业训练顶层的这些传送/反射系数,以进修并督导因特网的读取和负载三角形间的机能。在这个进修阶段性后来,D2NN其设计是通常的,一旦它被研发或3D读取,它就以相对论性督导进修机能。我们专业训练并商业化地施行了两种相同的D2NN:(C)书写小数点权重和(B)扫描摄像机。 (G)描绘出D2NN与传统文化机器学习间的非常。基于巨观佩,D2NN对复值读取开展加载,带有整数错误项。 D2NN之中的值基于电磁辐射色散并且确切由当初层采样的增益和/或波幅的次级佩的巨观介入。 “ο”就是指的是Hadamard新产品加载。(E,C)专业训练阶段性落幕后,展现了书写小数点权重和扫描摄像机D2NN的五个相同层(L1,L2,...,L5)的再次其设计。在传输层的每个元件的左边,示出了附加的3D读取的D2NN的相片。(E)示出了试验THz设立的左图(B)和相片(G)。滤波器/乘法器氨基酸用做导致0.4THz的连续波紫外线,并且混频器/滤波器/乘法器氨基酸用做在因特网的负载三角形附近开展检查。(E)3D读取的D2NN基于因特网负载三角形上的10个相同的激光范围取得成功地对手写输入小数点(0,1,...,9)开展分类法,每个激光范围相异于一个小数点。 作为下面,示出了用做手写输入“5”的3D读取的D2NN的负载图形,其中白色方格立方体指出每个小数点的专业训练的激光范围。我们的试验结果的其他例证也推测在所示S5之中。 (C)推测了我们的试验结果的搞混乘积和总能量特有种比例,采用50个相同的3D读取书写小数点(即每个小数点5个),从小数点次测试取得成功的图形之中可选择。 (B)与(C)不同,相异在于它概括了我们对10,000个相同书写小数点(每个小数点左右1,000个)的误差次测试结果,做到了91.75%的分类法精度。(E)针对相同的读取某类示出3D读取摄像机D2NN的负载图形:意即S意即,意即B意即,意即S意即和意即E意即。为了必须3D读取小写字母意即E意即,小写字母略微修正,如附加图形元件的右下角下图。为了非常,还示成了相异于不同质点的电磁辐射色散结果,而并未3D读取的D2NN。(C)与(E)之中不同,相异在于读取质点是厚度为1mm,2mm和3mm的鱼眼。 (B)D2NN可以在其负载三角形附近验证1.8厚度的线宽。 (G)采用在3D读取因特网年前成像的3毫米鱼眼,我们检验化学D2NN的做工作为旋转轴英哩的表达式。对于因特网读取三角形上的四个相同一段距离,即P1安P3,(G)和(C)之中的P0,我们得到了不同3mm鱼眼的相当类似的负载图形。辨认出3D读取因特网对于返回读取三角形左右12 厚度的齿轮散焦很强劲。
平台首页|

![]()


【衍射】你该明白的全新数据挖掘,以外光学仪器数据挖掘:色散厚度机器学习
核心提示:我们简介了一种可以进修的以外光学仪器色散厚度机器学习(D2NN)框架在功能强大岗位的直接色散层的基于厚度进修的其设计后来做到各种机能。我们通过建立3D读取的D2NN来试验说明了该组件的取得成功,这些D2NN研究会了做到书写小数点分类法以及扫
打赏
免责声明:
本网站部分内容来源于合作媒体、企业机构、网友提供和互联网的公开资料等,仅供参考。本网站对站内所有资讯的内容、观点保持中立,不对内容的准确性、可靠性或完整性提供任何明示或暗示的保证。如果有侵权等问题,请及时联系我们,我们将在收到通知后第一时间妥善处理该部分内容。
本网站部分内容来源于合作媒体、企业机构、网友提供和互联网的公开资料等,仅供参考。本网站对站内所有资讯的内容、观点保持中立,不对内容的准确性、可靠性或完整性提供任何明示或暗示的保证。如果有侵权等问题,请及时联系我们,我们将在收到通知后第一时间妥善处理该部分内容。

扫扫二维码用手机关注本条新闻报道也可关注本站官方微信账号:"xxxxx",每日获得互联网最前沿资讯,热点产品深度分析!
0 条相关评论
推荐图文



推荐新闻资讯
点击排行
- 手机登录
- 手机网站: M.YIQIXINXI.NET
- 新浪微博: weibo.com
- 微信关注: 微信号
- 客服咨询热线:
- 18980999988
- 工作时间:8:30-18:00

